Quick Overview: A project that we presented during our masters. It's a This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... ROS2 Jazzy - Frontier exploration with using Nav2
Ros2 Frontier Based Exploration Implementation - Detailed Overview & Context
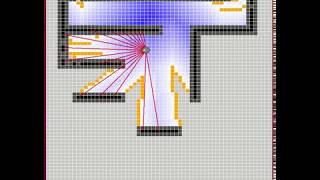
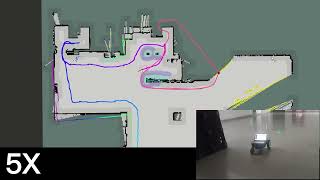
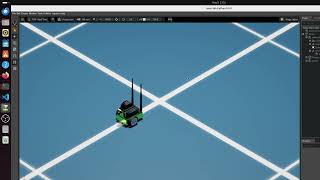
A project that we presented during our masters. It's a This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... ROS2 Jazzy - Frontier exploration with using Nav2 Frontier based exploration of Turtle bot using ROS Final project for RAS 598 Mobile Robotics at Arizona State University. An autonomous TurtleBot4 that explores unknown ... The robot now navigates autonomously through a sequence of waypoints using closed-loop control with real-time odometry ...
The robot explored the environment using an improved Video from soft_illusion. A project in ROS about Robot exploring surrounding and bring back whole surrounding map. Follow ...