Quick Overview: Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... The project was made by Ciprian Dumitrache and Andreea Stratulat, studying Applied Industrial Electronics Final project for RAS 598 Mobile Robotics at Arizona State University. An
Ros2 Frontier Autonomous Exploration Using - Detailed Overview & Context
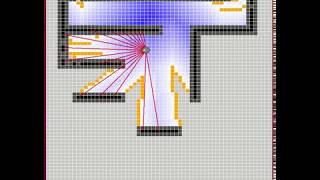
Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... The project was made by Ciprian Dumitrache and Andreea Stratulat, studying Applied Industrial Electronics Final project for RAS 598 Mobile Robotics at Arizona State University. An UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ... Frontier Based Exploration Algorithm Demonstration. This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works,
ROS2 Jazzy - Frontier exploration with using Nav2 Autonomous Exploration with Frontier-based Exploration Algorithm Autonomous exploration using TurtleBot3 and ROS2 with autonome finetuning