Quick Overview: This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... A project that we presented during our masters. It's a Support on ROS Kinetic is a bit sketchy, problems
Frontier Based Exploration Using Hybrid - Detailed Overview & Context
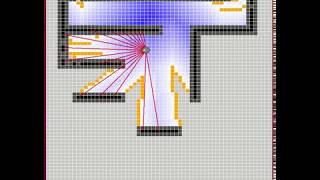
This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... A project that we presented during our masters. It's a Support on ROS Kinetic is a bit sketchy, problems Autonomous minesweeper system. The ground vehicle maps the are Hybrid mapping with autonomous exploration - Mobile robot In this paper, we propose an extension to classical
An integrated system of three nimble, lightweight robots which can travel over difficult obstacles by air, but also travel An autonomous robot that explores the terrain and intelligently calculates the relationship between points and finds the shortest ... Autonomous Exploration with Frontier-based Exploration Algorithm Frontier Based Exploration Algorithm Demonstration. The simulation consists of three algorithms: 1) Original Grey Wolf Optimizer (GWO) 2) Coordinated Multi-robot Hardware: Unitree GO2, Nvidia Orin NX 16GB, Livox MID360 Software: Fast-lio, octomap_server, Pointcloud_to_Laserscan, ...
Assistant Professor Calin Belta (Mechanical Engineering) and his research team discuss autonomous robotics, control theory and ...