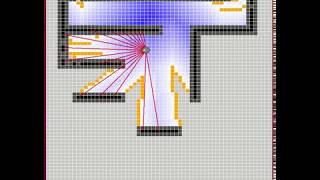
Quick Overview: This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, Frontier Based Exploration Algorithm Demonstration. Final project for the course ENPM808X: Software Development for
Frontier Exploration Robot - Detailed Overview & Context
This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, Frontier Based Exploration Algorithm Demonstration. Final project for the course ENPM808X: Software Development for In this article a coordinated approach to 3D Heriot-Watt University School of Mathematical and Computer Sciences Master in With an increasing significance of digitisation and machine intelligence in the field of medicine, medical
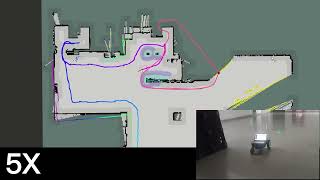
An in-depth look at the mapping, navigation and