Quick Overview: A project that we presented during our masters. It's a Final project for RAS 598 Mobile Robotics at Arizona State University. An autonomous TurtleBot4 that explores unknown ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ...
Ros2 Frontier Exploration - Detailed Overview & Context
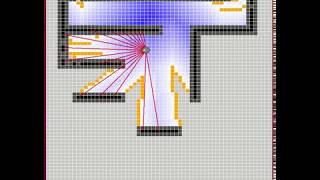
A project that we presented during our masters. It's a Final project for RAS 598 Mobile Robotics at Arizona State University. An autonomous TurtleBot4 that explores unknown ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". SLAM is an important ... Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... The testing environment is a study area with 194 meters squared floor area. The robot explored the environment using an ... ROS2 Jazzy - Frontier exploration with using Nav2