Quick Overview: A project that we presented during our masters. It's a Turtlebot3 Frontier-based exploration displayed on Rviz ROS-Gazebo: Turtlebot3 Navigation using Frontier Exploration
Frontier Exploration With Turtlebot3 - Detailed Overview & Context
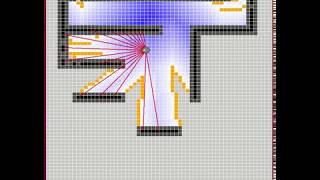
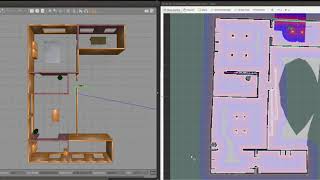
A project that we presented during our masters. It's a Turtlebot3 Frontier-based exploration displayed on Rviz ROS-Gazebo: Turtlebot3 Navigation using Frontier Exploration Demonstration of Autonomous Exploration Using Frontier-Based Approach - ROS Foxy, Gazebo, Turtlebot3 The robot is put inside an unknown environment, and the goal is to map the maze autonomously. From the occupancy grid map, ... Frontier Based Exploration Algorithm Demonstration.
This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... Autonomous minesweeper system. The ground vehicle maps the are using SLAM. This is a compilation of videos for Team Bebop's Fall 2021 final project for EECE-5550 Mobile Robotics at Northeastern University ... In this article a coordinated approach to 3D Autonomous exploration using TurtleBot3 and ROS2 with autonome finetuning