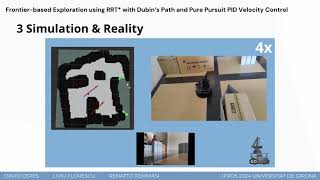
Quick Overview: In this article a coordinated approach to 3D A project that we presented during our masters. It's a A frontier-based approach for autonomous exploration
Autonomous Frontier Based Exploration With - Detailed Overview & Context
In this article a coordinated approach to 3D A project that we presented during our masters. It's a A frontier-based approach for autonomous exploration Autonomous Exploration with Frontier-based Exploration Algorithm Support on ROS Kinetic is a bit sketchy, problems with Odom. Kinetic will be supported fully in the coming months according to ... Many scenarios in which robots are used nowadays require some degree of
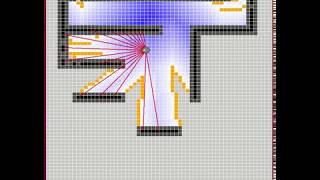
In this paper, we propose an extension to classical This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works,