Quick Overview: Cooperative Autonomous Exploration and Mapping without GPS Cooperative Mapping of an Unknown Space using Autonomous Robots with Low-Level Sensors Video complementing our conference paper in ICRA 2015.
Cooperative Autonomous Exploration And Mapping - Detailed Overview & Context
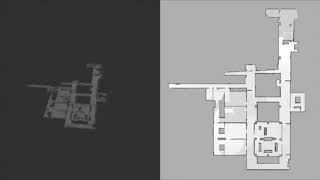
Cooperative Autonomous Exploration and Mapping without GPS Cooperative Mapping of an Unknown Space using Autonomous Robots with Low-Level Sensors Video complementing our conference paper in ICRA 2015. In this article a coordinated approach to 3D This work develops iterative Covariance Regulation (iCR), a novel method for active Three quadrotors explore and patrol a simulated environment of the second floor of GWU's School of Engineering and Science ...
A team from Carnegie Mellon University and Oregon State University is sending ground and aerial A Pioneer ground vehicle autonomously explores a Styrofoam environment while generating an exact occupancy grid Decentralized Strategy for Cooperative Multi-Robot Exploration and Mapping Inside a cleanroom at NASA's Jet Propulsion Laboratory in Pasadena, California, three moon rovers undergo final checks before ... Autonomous Exploration and Mapping System Using Heterogeneous Robot Agents with Optimized Perception Kostas Alexis Assistant Professor, University of Nevada, Reno October 28, 2016
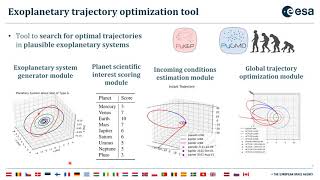
Presentation for the ICATT 2021 conference.