Quick Overview: This work presents a path planning strategy for the This video showcases a selection of projects from our lab focused on Presentation at 2022 IEEE/RSJ International Conference on Intelligent
Autonomous Field Robotics Coverage Exploration - Detailed Overview & Context
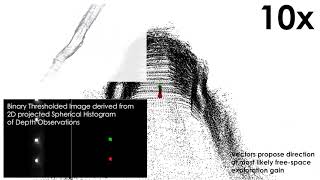
This work presents a path planning strategy for the This video showcases a selection of projects from our lab focused on Presentation at 2022 IEEE/RSJ International Conference on Intelligent The PX4 Developer Summit is the annual flagship conference hosted by Dronecode for the drone development community. This video presents indicative results of a sequence of In this work, we present an approach for the detection of the direction of free space in order to improve the efficiency of
In this article a coordinated approach to 3D PhD Defense of Sina Sharif Mansouri Please see the full text of the thesis on following link: ... Title Representation Granularity Enables Time-Efficient In this work we present a new methodology on learning-based path planning for See the other videos in this series: This video ... Introduction to Reinforcement Learning and PPO for robotics VLA for autonomous driving series