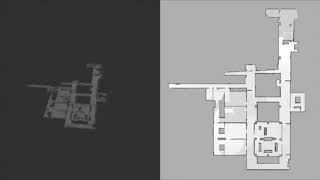
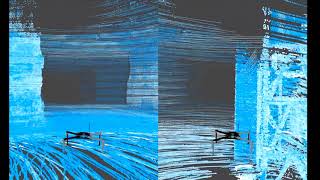
Quick Overview: Three quadrotors explore and patrol a simulated environment of the second floor of GWU's School of Engineering and Science ... Programa Crescimento Azul dos EEA Grants apresenta: CoMap – multi-vehicle cooperative localization using pose graph techniques and v2v communication
Multi Vehicle Cooperative Exploration And - Detailed Overview & Context
Three quadrotors explore and patrol a simulated environment of the second floor of GWU's School of Engineering and Science ... Programa Crescimento Azul dos EEA Grants apresenta: CoMap – multi-vehicle cooperative localization using pose graph techniques and v2v communication This is the recorded presentation of research paper entitled " This project presents the development process of a Three robots cooperatively generate a 3D occupancy grid map of The George Washington University's School of Engineering and ...
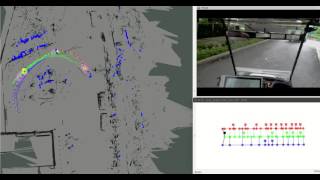
NOAA Central Library Seminars Speaker: Larry Mayer, Center for Coastal and Ocean Mapping, Professor and Director Sponsors: ... Multi-vehicle Cooperative Localization Using Pose Graph In this video, F450 drones with pixhawks are used. Decentralized Strategy for Cooperative Multi-Robot Exploration and Mapping The Exploration Company - We Build Space Vehicles for a Cooperative Future Our NA155 expedition was a successful example of ocean
Decentralized Multi-UAV Cooperative Exploration in GPS-Denied Environments