Quick Overview: This lecture is part of the "Drones Demystified!" educational project. Presentation by Tim Barfoot as part of the Tartan SLAM Series. Series overviews and links can be found on our webpage: ... Project ID: F36 Submission Category: Fundamental Research Title: Stochastic Approximation Approach for
State Estimation Of A Simulated - Detailed Overview & Context
This lecture is part of the "Drones Demystified!" educational project. Presentation by Tim Barfoot as part of the Tartan SLAM Series. Series overviews and links can be found on our webpage: ... Project ID: F36 Submission Category: Fundamental Research Title: Stochastic Approximation Approach for B5.2 An Extended Kalman Filter for State Estimation Coursera Robotics Capstone project: B5.2 An Extended Kalman Filter for The PX4 Developer Summit is the annual flagship conference hosted by Dronecode for the drone development community.
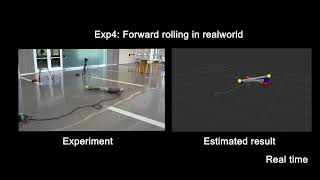
This video shows the results of our papers titled "Secure Wenzhe Tong, Tzu-Yuan Lin, Jonathan Mi, Yicheng Jiang, Maani Ghaffari, Xiaonan Huang IEEE Robotics and Automation Letters ...