Quick Overview: For more information, please refer to: X. Shen, S. Pendleton, and M. H. Ang Jr., " ICRA 2018 Spotlight Video Interactive Session Wed AM Pod O.7 Authors: Ahmad, Aamir; Lawless, Guilherme; Lima, Pedro U. As companies expand globally, the complexity of
Scalable Cooperative Localization With Minimal - Detailed Overview & Context
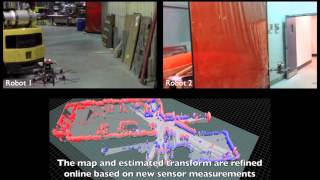
For more information, please refer to: X. Shen, S. Pendleton, and M. H. Ang Jr., " ICRA 2018 Spotlight Video Interactive Session Wed AM Pod O.7 Authors: Ahmad, Aamir; Lawless, Guilherme; Lima, Pedro U. As companies expand globally, the complexity of This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... One Surface Vehicle supporting a fleet of AUVs Accompanying video for: "Efficient AUV Navigation Fusing Acoustic Ranging and ... This is a brief overview of CoLo: A Performance Evaluation System for Multi-robot
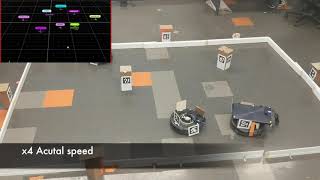
Video abstract for paper published in NAVIGATION: Journal of the Institute of Navigation, Volume 72 Number 4. For full paper, or ... Target Defense with Cooperative Localization We often justify over-engineered architectures: 20 microservices, Kubernetes, and message brokers by saying "we're building for ... ION GNSS+ 2023 Isabella Torres and Grace Gao For paper, slides, and additional NAV Lab publications: ... Four vehicles: only one has access to GPS and the rest have the range and bearing information. The video shows that a group of mobile robots are moving in a circular trajectory where the objective is to perform the


![[Webinar] Building Secure, Scalable Localization Workflows](https://i.ytimg.com/vi/NYmtuwor4dI/mqdefault.jpg)