At a Glance: This video supports the theoretical claims made in our paper with the same title, which is accepted by Robotics: Science and ... Presentation for the IEEE/RSJ International Conference on Intelligent Robots and Systems 2023.
Memmows Robust Optimization With Application To Task Space Inverse Dynamics -
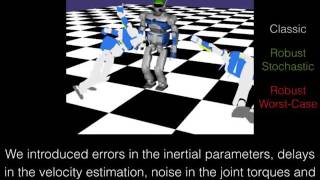
This video supports the theoretical claims made in our paper with the same title, which is accepted by Robotics: Science and ... Presentation for the IEEE/RSJ International Conference on Intelligent Robots and Systems 2023. Compliant balance using: - Advanced torque tracking - Kalman based state estimation -
Important details found
- This video supports the theoretical claims made in our paper with the same title, which is accepted by Robotics: Science and ...
- Presentation for the IEEE/RSJ International Conference on Intelligent Robots and Systems 2023.
- Compliant balance using: - Advanced torque tracking - Kalman based state estimation -
- Paper: Code and more: Abstract - Robots must make and break contact to ...
Why this topic is useful
Readers often search for Memmows Robust Optimization With Application To Task Space Inverse Dynamics because they want a clearer explanation, related examples, and a practical way to continue exploring the topic.
Frequently Asked Questions
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
![[memmows] Robust optimization with application to task space inverse dynamics](https://i.ytimg.com/vi/gBFh7GF-h4M/mqdefault.jpg)
![[memmows] QP-based task-space inverse dynamics: theory and implementation. Part 1](https://i.ytimg.com/vi/lSPSLbgrtQg/mqdefault.jpg)
![[memmows] QP-based task-space inverse dynamics: theory and implementation. Part 2](https://i.ytimg.com/vi/c9g3L3YMhds/mqdefault.jpg)