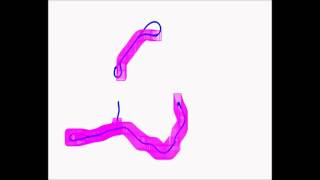
Quick Overview: Four vehicles: only one has access to GPS and the rest have the range and bearing information. Accepted to IROS 2021. We present a consistent and distributed state estimator for multi-robot This simulation shows the observability property of relative sensing.
Fw Cooperative Localization - Detailed Overview & Context
Four vehicles: only one has access to GPS and the rest have the range and bearing information. Accepted to IROS 2021. We present a consistent and distributed state estimator for multi-robot This simulation shows the observability property of relative sensing. Our project video in EQ2440 Project in Wireless communication, about Vincent Drevelle, Luc Jaulin and Benoît Zerr (submitted to IROS 2015) An interval-based distributed positioning system relying on ... UAVs localize themselves using two landmarks.
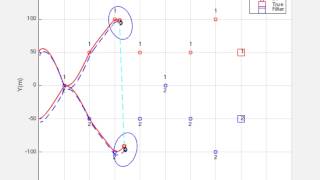
We handle a scenario in which the goal point is located at (800800). The environmental disturbance direction is plotted with blue ... Cooperative localization using particles intersection Discrete Time Observability For Cooperative Localization using automated synchronization Target Defense with Cooperative Localization Reliable Cooperative Localization for Vehicles sharing GNSS pseudo-ranges Corrections This is the simulation result for w = 1.0 rad/s. Full paper can be found at ...
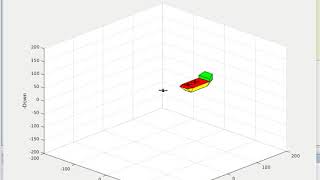
Smart Munitions: Cooperative Homing using Cooperative Localization This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... The goal here is to land a single quadcopter on the moving and oscillating ship deck with range-only measurements. The other ... Control for improving cooperative localization using bearing-only relative measurements