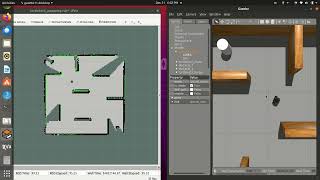
Quick Overview: In this workshop, we create a map using the TurtleBot and Virtual SLAM - TurtleBot3 Waffle-pi Simulation 환경 : ROS2_foxy, ubuntu20.04, rviz2 머신 :
Turtlebot3 Slam - Detailed Overview & Context
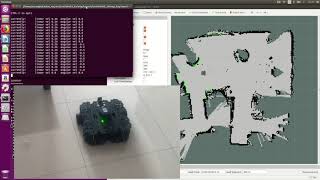
In this workshop, we create a map using the TurtleBot and Virtual SLAM - TurtleBot3 Waffle-pi Simulation 환경 : ROS2_foxy, ubuntu20.04, rviz2 머신 : ROS2 turtlebot3 SLAM with second robot deployment This video results from our testing from conducting a Audio is very glitchy sadly. I don't have the time or the patience to delete it and do a voice over. Mute and speed up as much as ...



![Learning ROS Through Simulation with TurtleBot3 and Gazebo [Part 2]](https://i.ytimg.com/vi/3hswO5bAIK4/mqdefault.jpg)