Quick Overview: Turtlebot3 Autorace gazebo & matlab simulation Welcome to this comprehensive tutorial on controlling Welcome back to YOI Robotics! This is Part 2 of our ROS2
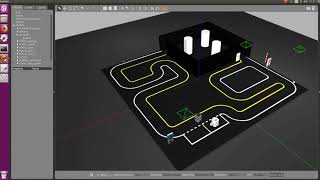
Turtlebot3 A Star Gazebo Simulation - Detailed Overview & Context
Turtlebot3 Autorace gazebo & matlab simulation Welcome to this comprehensive tutorial on controlling Welcome back to YOI Robotics! This is Part 2 of our ROS2 Project Description 1. Uses A* with differential drive motion (8 RPM-based action sets). 2. Simulates robot path planning and ... I have implemented the A* path planning algorithm on a non-holonomic differential drive robot in ROS - Turtlebot3 + camera demonstration in Gazebo
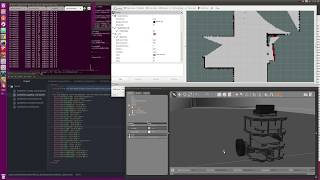
slam_toolbox on turtlebot3 - Gazebo demonstration Source code is hosted on Github: The video shows DiffBot in Here, we create an RRT at the robot's current position, then draw it overlaid on the LIDAR map with rviz. No path planning here yet ... Demo of the implementation of the A* path planning algorithm by a This lecture makes part of my course ROS For Beginners: Basics, Motion and OpenCV