Quick Overview: Test Local Planner Timed Elastic Band (Actual Test) Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Robotics and ...
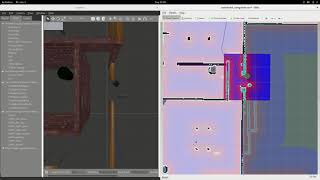
Test 3 Local Planner Trajectory - Detailed Overview & Context
Test Local Planner Timed Elastic Band (Actual Test) Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Robotics and ... Code available here: Paper available at: GAZEBO worlds used in ... Max Lodel, Bruno Brito, Álvaro Serra-Gómez, Laura Ferranti, Robert Babuška, Javier Alonso-Mora Where to Look Next: Learning ... The problem of navigating an unmanned aerial vehicle (UAV) in an unknown environment is addressed with a novel model ...
Venue: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Authors: Maria Stamatopoulou*, Jianwei ...









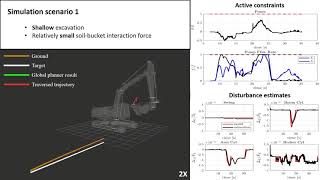
![[IROS2021] Real Time Motion Planning of a Hydraulic Excavator using Trajectory Optimization and MPC](https://i.ytimg.com/vi/9aI1gCocP-E/mqdefault.jpg)

![[IROS 2019] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://i.ytimg.com/vi/gwV0YRs5IWs/mqdefault.jpg)



