Quick Overview: Robotic Exploration through Semantic Topometric Dr. Volkan Isler, Professor in the Department of Computer Science & Engineering at the University of Minnesota, presenting in the ... Abstract: ======== Reliable operation in everyday human environments – homes, offices, and businesses – remains elusive for ...
Robotic Exploration Through Semantic Topometric - Detailed Overview & Context
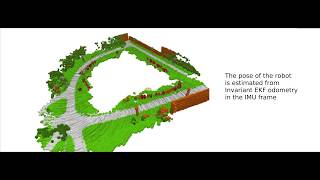
Robotic Exploration through Semantic Topometric Dr. Volkan Isler, Professor in the Department of Computer Science & Engineering at the University of Minnesota, presenting in the ... Abstract: ======== Reliable operation in everyday human environments – homes, offices, and businesses – remains elusive for ... Please see the new version : We introduce a new We present Language Frontier Guide (LFG), an algorithm for guiding real-world This work focuses on the problem of visual target navigation, which is very important for autonomous
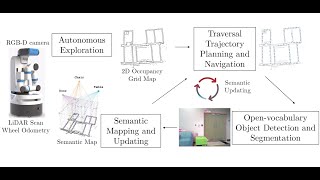
ICRA paper link: Arxiv paper link: Result ... Preprint: Researchers: Benjamin Bogenberger, Oliver Harrison, Orrin Dahanaggamaarachchi, ... Phew! 60 seconds is not a lot of time to explain the motivation and solution for a research problem but that's what the submission ... In this video we demonstrate our efforts to equip service The ability to process complex spatio-temporal information is a fundamental process underlying the behavior of all higher ...




![[OLD]: Autonomous Exploration and Semantic Updating of Large-Scale Environments with Mobile Robots](https://i.ytimg.com/vi/JZEqckOw2jM/mqdefault.jpg)






![[arXiv '24] Real-Time 3D Semantic Scene Perception for Egocentric Robots with Binocular Vision](https://i.ytimg.com/vi/-dho7l_r56U/mqdefault.jpg)