Quick Overview: The talk was presented during the IEEE International Conference on Intelligent Transportation Systems Paper: Y. Zheng, B. Shyrokau and T. Keviczky, "Comfort and Time Efficiency: A Roundabout Case Study," Video presentation for the 24th IEEE International Conference on Intelligent Transportation. Paper: ...
Itsc 2021 Sampling Based Optimal - Detailed Overview & Context
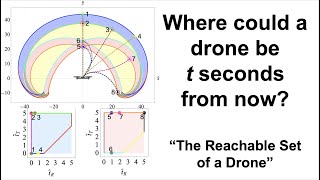
The talk was presented during the IEEE International Conference on Intelligent Transportation Systems Paper: Y. Zheng, B. Shyrokau and T. Keviczky, "Comfort and Time Efficiency: A Roundabout Case Study," Video presentation for the 24th IEEE International Conference on Intelligent Transportation. Paper: ... This video accompanies the paper " Safe Overtaking Maneuver for Autonomous Vehicle under Risky Situations If you know the position, velocity and orientation of a quadcopter, can you predict where it will be next? Better yet, can you predict ... We address the challenge of real-time planning of minimum-time trajectories over multiple waypoints, onboard multirotor UAVs.
Recorded presentation for my own future reference. 00:00 - Outline 00:45 - Background and Previous Works 06:15 - Experimental ... To share this video: Twitter: Linkedin: ... How to interpret the ANSI Z1.4 standard to determine the appropriate Autonomy Talks - 05/05/21 Speaker: Kristoffer Bergman, Linköping University Title: Tightly Combining This is the presentation of the following paper. Masaya Mizutani, Manabu Tsukada, Hiroshi Esaki, "AutoMCM: Maneuver ... The capabilities of dynamicity, flexibility and agile production are enablers to Smart Factory and Industry 4.0. One critical feature to ...
In recent years, reachability analysis has gained considerable popularity in motion planning and safeguarding of automated ...


![Sampling-based Optimal Planning [Reading Group : 10.10.21]](https://i.ytimg.com/vi/yZchtTg4nvs/mqdefault.jpg)