Reference Summary: This is Quadbot 17, a work-in-progress quadruped robot with 22 degrees of freedom, based on Robotis AX-12 motors and a ... Majenta Strongheart breaks down some of the coolest submissions from the Open Hardware Design Challenge.
Gimbalbot Hackaday Prize Entry Video Phase 1 -
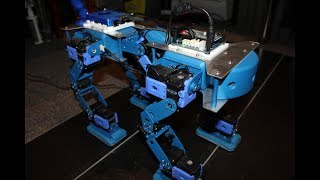
This is Quadbot 17, a work-in-progress quadruped robot with 22 degrees of freedom, based on Robotis AX-12 motors and a ... Majenta Strongheart breaks down some of the coolest submissions from the Open Hardware Design Challenge. Or a network of wireless sensor modules chatting with each other and forming personalities, ...
Important details found
- This is Quadbot 17, a work-in-progress quadruped robot with 22 degrees of freedom, based on Robotis AX-12 motors and a ...
- Majenta Strongheart breaks down some of the coolest submissions from the Open Hardware Design Challenge.
- Or a network of wireless sensor modules chatting with each other and forming personalities, ...
Why this topic is useful
The goal of this page is to make Gimbalbot Hackaday Prize Entry Video Phase 1 easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Gimbalbot Hackaday Prize Entry Video Phase 1 and connects it with related entries, references, and supporting context.