At a Glance: This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Watch this comprehensive demonstration of a Pure Pursuit geometric controller integrated with A*
Getting Robot Navigation Working Path Planning Config -
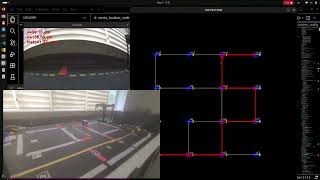
This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Watch this comprehensive demonstration of a Pure Pursuit geometric controller integrated with A* This video presents a demonstration conducted as part of the POSCO Industrial AI-
Important details found
- This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ...
- Watch this comprehensive demonstration of a Pure Pursuit geometric controller integrated with A*
- This video presents a demonstration conducted as part of the POSCO Industrial AI-
- This video shows the solution to one of the coding exercises for the lecture 08:
- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Getting Robot Navigation Working Path Planning Config and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.



![[Path planning] A* algorithm with a potential function for robot navigation](https://i.ytimg.com/vi/FPOo4vpg7ts/mqdefault.jpg)




