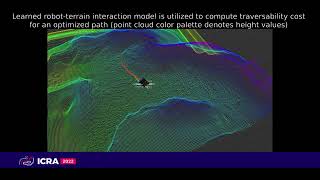
Short Overview: experimental results are demonstrated for three non-prehensile manipulation tasks of increasing complexity: (1) ... ICRA 2021 presentation by Simon Schaefer - Leveraging Neural Network Gradients within
Fast Manipulability Maximization Using Continuous Time Trajectory Optimization Iros 19 -
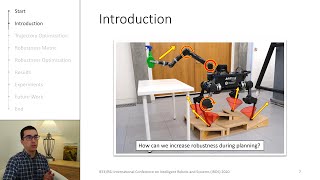
experimental results are demonstrated for three non-prehensile manipulation tasks of increasing complexity: (1) ... ICRA 2021 presentation by Simon Schaefer - Leveraging Neural Network Gradients within
Important details found
- experimental results are demonstrated for three non-prehensile manipulation tasks of increasing complexity: (1) ...
- ICRA 2021 presentation by Simon Schaefer - Leveraging Neural Network Gradients within
Why this topic is useful
The goal of this page is to make Fast Manipulability Maximization Using Continuous Time Trajectory Optimization Iros 19 easier to scan, compare, and understand before opening related resources.
Frequently Asked Questions
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Fast Manipulability Maximization Using Continuous Time Trajectory Optimization Iros 19 and connects it with related entries, references, and supporting context.