Short Overview: Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Distributed ...
Deepig Multi Robot Information Gathering With Deep Reinforcement Learning -
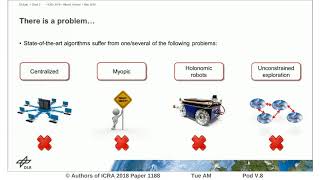
Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Distributed ... Paper: Abstract: This paper considers the problem of planning trajectories for a team of ...
Important details found
- Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions
- ICRA 2018 Spotlight Video Interactive Session Tue AM Pod V.8 Authors: Viseras, Alberto; Xu, Zhe; Merino, Luis Title: Distributed ...
- Paper: Abstract: This paper considers the problem of planning trajectories for a team of ...
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Frequently Asked Questions
What is this page about?
This page summarizes Deepig Multi Robot Information Gathering With Deep Reinforcement Learning and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.






![[IEEE TVT] Multi-Robot Cooperative Exploration via Deep Reinforcement Learning](https://i.ytimg.com/vi/Gt5haGmKH0Q/mqdefault.jpg)
