Reference Summary: This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of ... Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise ...
Control Bootcamp Overview -
This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of ... Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise ... Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and ...
Important details found
- This video explores the observability of a linear system, namely the ability to estimate the full state "x(t)" from a time-history of ...
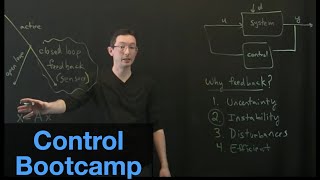
- Here we investigate the benefits of feedback for systems with uncertain dynamics and disturbances, as illustrated on a cruise ...
- Here, we discuss the Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and ...
- We begin with the simple test in terms of the rank of the controllability ...
Why this topic is useful
This topic is useful when readers need a quick overview first, then want to move into supporting details and related references.
Frequently Asked Questions
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
What is this page about?
This page summarizes Control Bootcamp Overview and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.

![The Kalman Filter [Control Bootcamp]](https://i.ytimg.com/vi/s_9InuQAx-g/mqdefault.jpg)


![Controllability [Control Bootcamp]](https://i.ytimg.com/vi/u5Sv7YKAkt4/mqdefault.jpg)

