Topic Brief: Multi-Hypotesis AMCL with 2D Lidar Gridmaps/Octomaps in Simulated Summit XL
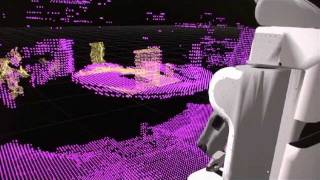
3d Mapping Using Octomap Webots Pointcloud -
Participation & Networking Considerations for this topic.
Important details found
- Multi-Hypotesis AMCL with 2D Lidar Gridmaps/Octomaps in Simulated Summit XL
Why this topic is useful
Readers often search for 3d Mapping Using Octomap Webots Pointcloud because they want a clearer explanation, related examples, and a practical way to continue exploring the topic.
Sponsored
Frequently Asked Questions
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
What should readers check next?
Readers should check related pages, official references, or updated sources when details matter.
Why are related topics included?
Related topics help readers compare nearby references and understand the broader subject.
Supporting Images









Sponsored