Main Takeaway: Euclidean distance is explained in step by step approach using ROS2 package turtlesim. In this video, we'll dive into the Go flag module for reading command-line flags!
Send A Goal Path To 13164 -
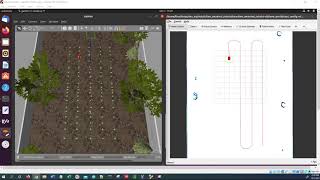
Euclidean distance is explained in step by step approach using ROS2 package turtlesim. In this video, we'll dive into the Go flag module for reading command-line flags! Moving a virtual SCUTTLE robot to a specific coordinate using a custom ROS node.
Important details found
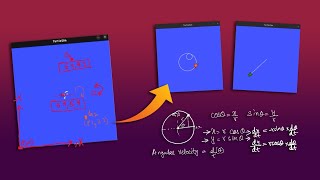
- Euclidean distance is explained in step by step approach using ROS2 package turtlesim.
- In this video, we'll dive into the Go flag module for reading command-line flags!
- Moving a virtual SCUTTLE robot to a specific coordinate using a custom ROS node.
- Speaker: Jacob Walker, Ardan Labs () Like C, Go uses both stack and heap memory.
- Did you know that the 'map' type has a whole new implementation as of Go 1.24?
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Send A Goal Path To 13164 and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Topic Gallery








Sponsored