Short Overview: This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Federico Boniardi, Abhinav Valada, Wolfram Burgard, Gian Diego Tipaldi 2016 IEEE International Conference on
Autonomous Indoor Robot Navigation Using 33606 -
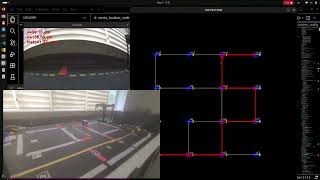
This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Federico Boniardi, Abhinav Valada, Wolfram Burgard, Gian Diego Tipaldi 2016 IEEE International Conference on AukiLabs is a spatial computing company based in Hong Kong, focused on creating digital twins of
Important details found
- This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ...
- Federico Boniardi, Abhinav Valada, Wolfram Burgard, Gian Diego Tipaldi 2016 IEEE International Conference on
- AukiLabs is a spatial computing company based in Hong Kong, focused on creating digital twins of
- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Why this topic is useful
This format is designed to help readers move from a broad question into more specific pages without losing context.
Sponsored
Frequently Asked Questions
What is this page about?
This page summarizes Autonomous Indoor Robot Navigation Using 33606 and connects it with related entries, references, and supporting context.
Is the information always complete?
Not always. Some topics may need verification from official or primary sources.
How should readers use this information?
Use it as a starting point, then open related pages for more specific details.
Visual References









Sponsored